A Probabilistic Approach for Complete Coverage Path Planning with low-cost Systems
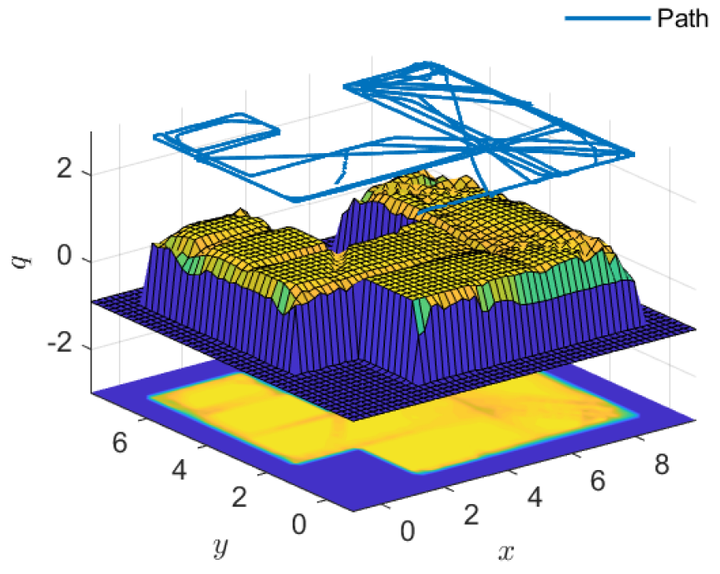 Example of the proposed path planning method.
Example of the proposed path planning method.
Abstract
Domestic robots, such as vacuum cleaners or lawn mowers, are mostly based on a low-cost design to make them affordable for the consumer. This often results in such robots being equipped with only simple sensors, such as in-/outside area detectors for lawn mowers. Intelligent navigation and planning strategies, however, usually require additional sensors like LiDAR sensors, cameras or time of flight sensors. Thus, there is a lack of intelligent approaches for the complete coverage of the workspace under consideration of only minimal sensing capabilities. In this work, we propose a probabilistic planning method for low-cost robots with limited sensing capabilities to completely cover an enclosed environment. Our planning approach thereby utilizes Monte Carlo Localization for estimating coverage probabilities based on the particle distribution. These coverage probabilities are stored in a grid map on the basis of which an intelligent path planning approach determines the next locations to be visited. We demonstrate our approach in different simulation scenarios for a realistic autonomous lawn mower with only in-/outside area detection capabilities. As comparison benchmark we use the common random walk mowing pattern.
Nils Rottmann
Team Lead for Robotics & Autonomous Systems
With September 2021, Nils Rottmann started as a Software Developer/Product Owner at the Hako GmbH. He studied Theoretical Mechanical Engineering at the Hamburg University of Technology, Germany and holds a PhD in Robotics from the University of Luebeck, Germany, In his PhD with the title “Smart Sensor, Navigation and Learning Strategies for low-cost lawn care Systems”, he developed low-cost sensor systems and investigated probabilistic learning and modeling approaches. Currenlty, he works as a Team Lead for the robotic section at the Hako GmbH.